Student Projects
VG100
Astronomia
Mars Pro Max
Instructor: Prof. Yanfeng Shen, Prof. Ting Sun
Team Members: Boyan Li, Hongze Liu, Jiayi Pan, Songwen Hu, Yongqi Zheng
Project Video
Team Members
Team Members:
Boyan Li, Hongze Liu, Jiayi Pan, Songwen Hu, Yongqi Zheng
Instructor:
Prof. Yanfeng Shen, Prof. Ting Sun
Project Description
Problem Statement
In the era of Mars colonization, people will need machines for all kinds of purposes. However, it is a waste of material and money to manufacture the machines separately on Mars even if they share some same functions, especially in a complex task.
Needs
The modularization idea in our Mars Pro Max, “one platform + function modules + an optional chassis”, is our solution to the manufactory shortage problem on Mars.
We want to develop:
- A platform that supports and powers the modules.
- Replaceable modules for various uses.
- Optional chassis for extreme terrain.
Design Description
Platform: The platform manages the whole system. It has 3 module slots, an Arduino Mega board plus an ESP32 board as the controller, a built-in power bank, 3 L298N DC Motor Driver modules to power and control up to six motors in the chassis.
Modules:
- Robotic Arm: It is a 6 degrees of freedoms (DoF) robotic arm that can lift up to 800 grams of weight.
- Camera Module: It combines an ESP32-Camera that support online streaming and a camera pan with 2 DoF.
- Solar Panel: Solar panel can automatically adjust its position to receive the most light. With the help of robotic arm, this module can charge other cars.
- Karaoke: It has a speaker to deliver music and a light effect system to simulate the lights in the Disco hall.
Chassis: We have designed a series of chassis, which can support at most six wheels (or functional legs). A decent damping system is added to prepare for the rocky terrain.
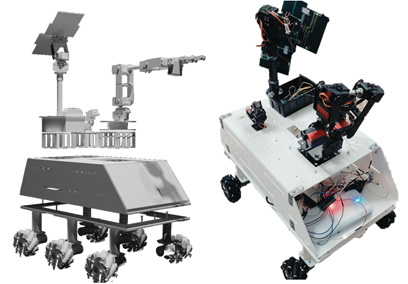
Fig. 1. a The 3-level Modular Design (left)
Fig. 1. b Overview of Mars Pro Max (right)

Fig. 2 Function Modules
Significance of Solution
Universal Plug: This design makes the replacement, upgrade and repair of the modules much more convenient. It consists of one male and one female board, connected by metal clips to keep the current flow. In
addition, springs and electro-magnet are added to make the connection stable.
Interface: All the control interfaces are digitally running on Web, making them easier to be modified and upgraded.
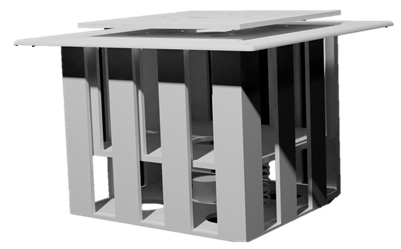
Fig. 3 The Universal Plug
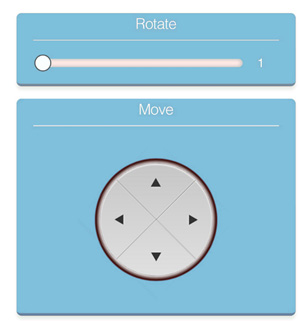
Fig. 4 One Control Interface
Validation
Validation Process:
To test the connection stability between the universal plug and the platform, we use all the modules to do verification tests. For the chassis and platform, the stability of motion is tested. The functions of all the modules are also tested.
Validation Results: According to validation part, most specifications can be met.
√ The connection between the universal plug and the platform is stable.
√ The movement is relatively stable.
√ All the modules work properly.
√ The cooperation between the two modules is implementable.
Conclusion
Our Mars Explorer realizes modular design well. The four finished modules can independently perform its own task as well as cooperate to perform complex tasks. What‘s more, the design of universal plug makes the switch, repair and development of modules much easier. Finally, the optional, replaceable chassis provides the car the mobility in Mar’s complex environment.
Acknowledgement
Professor Yanfeng Shen, SJTU Global College
Professor Ting Sun, SJTU Global College
Dongxiao Yang, Hao Liu, Yang Shen, Yifan Shen, VG100 Teaching Assistants at SJTU Global College
Reference
[1] https://www.blender.org
[2] https://github.com/s00500/ESPUI