Student Projects
VG100
The Camouflager
Instructor: Prof. Yanfeng Shen, Prof. Ting Sun
Team Members: Shenyi Qiao, Yiying Jiang, Daniela Mata, Jiayuan Rao and Lang Shen
Project Video
Team Members
Team Members:
Shenyi Qiao, Yiying Jiang, Daniela Mata, Jiayuan Rao and Lang Shen
Instructor:
Prof. Yanfeng Shen, Prof. Ting Sun
Project Description
Problem Statement
The Mars explorer will encounter dangers in this unknown environment, such as a potential alien attack. As all alien attack strategies are currently unknown to engineers, the optimal solution to ensure the survival of our explorer is camouflaging it. The explorer will behave like a chameleon, it will be able to disguise itself by changing its color according to the surrounding environment.
Needs
- Color-changing function
- Dynamic function and control all movements
- Shell design to optimize the space division and deal with environment.
Design Description
The TCS3200 color sensor will detect the RGB components of under and transmit them to Arduino Mega, then according RGB data will be transferred to the WS2812 LED screen to display the color. As for dynamic function, a self-designed app is used to link Bluetooth unit HC06 and operate the movement through Arduino Uno. The inner and outer shell were both made by 3D printing. The inner shell is double-decked to better arrange and utilize the space for controlling parts.

Fig. 1 Detailed components design
Significance of Solution
The Camouflager is a unique and novel realization. Those NASA Mars explorers designs like “Spirit”, “Opportunity” and “Curiosity” didn’t take the unknown dangers into consideration. Except those basic instructions of research, our rover also emphasizes the survival by dealing with the possible threat.
The color-changing function is optimized with the WS2812 LED screen and TCS3200 color sensor.
We chose it because its 5050 RGB light has brighter light and better light focus RGB lights under the same voltage than others. Also, the TCS3200 color sensor can a wide range of visible colors.
The movements will be totally controlled by the engineers using the self-designed app through an online Arduino code developing environment App Inventor. The customized can maximumly suit our needs. Also, using omnidirectional wheels makes the direction change easier.
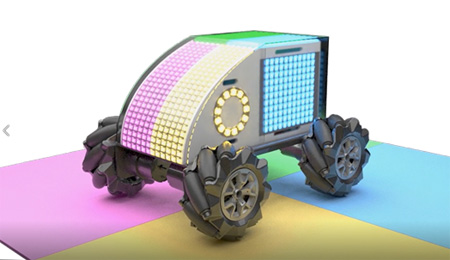
Fig. 2 Demonstration of color disguising and WS2812 LED
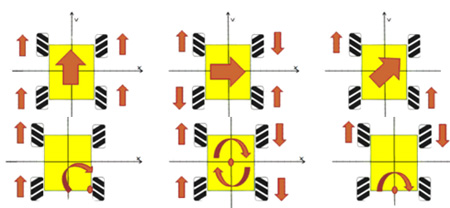
Fig. 3 Omnidirectional wheels instruction
Validation
Validation Process:
For the motion system, the stability and flexibility are tested.
For the communication system, we use the self-designed smart phone app to control the car.
For the camouflage system, we let the car run on a color map.
According to validation part, most specifications can be met.
√ The car can move in different direction and speed steadily.
√ The Bluetooth unit can receive the order in a negligible short time.
√ The sensor can detect colors’ RGB components correctly in 0.5s.
√ The algorithm can convert input data into proper output RGB values.
√ The algorithm can eliminate the small oscillation in input data.
√ The LED matrix can give out stable light with designed colors.
Conclusion
The Camouflager is able to behave like a chameleon, disguising itself by changing colors. The color sensors located on the four corners under the car are working as expected. They allow the colors to be detected and then display these colors through the LED screens on the according parts car.
Acknowledgement
Professor Yanfeng Shen, SJTU Global College
Professor Ting Sun, SJTU Global College
Dongxiao Yang, Hao Liu, Yifan Shen, Yang Shen, VG100 Teaching Assistants at SJTU Global College
Reference
[1] forums.xilinx.com/t5/Adaptable-Advantage-Blog/Past-Present-Future-Xilinx-on-Mars-Rovers/ba-p/944915
[2] www.instructables.com/id/Getting-Started-With-NeoPixle-WS2812-RGB-LED/