Student Projects
VG100
The Hercules
Instructor: Prof. Yanfeng Shen, Prof. Ting Sun
Team Members: Heeseung Han, Minqing Sun, Xiaojing Tan, Yiqian Zhang, Zexuan Yang
Project Video
Team Members
Team Members:
Heeseung Han, Minqing Sun, Xiaojing Tan, Yiqian Zhang, Zexuan Yang
Instructor:
Prof. Yanfeng Shen, Prof. Ting Sun
Project Description
Problem Statement
As the surface of Mars is scattered with stones and pits, exploration requires rovers with flexible structure with high intensity to conquer the obstacles. On the other hand, there are narrow caves and valleys impossible for ordinary rovers to get in. Therefore, this project aims to construct a prototype consists of two rovers cooperating with each other to fulfill exploring tasks.
Needs
The project aims to construct a primary rover which is able to contain a secondary rover.
The primary rover should have:
- An all-terrain roving stucture
- A releasing and retrieving system
- Various sensors
- The Secondary rover should have:
- A remote control system
Design Description
The primary rover is equipped with an all-terrain roving structure, a releasing and retrieving system, and a control system. The design of the structure adopts triangular shape with the front two wheels being able to rotate flexibly In order to maintain the balance. Furthermore, the frame is made of Aluminium to ensure its intensity. Secondly, the releasing and retrieving system consists of a lifting plate attached to two screw rods and powered by two step motors. As a result, the primary rover can send out the secondary rover and collect it afterwards. Furthermore, there all also distance sensor and wind sensors installed to increase the level of automation. For the secondary rover, it adopts caterpillar belt as the transmission system and is equipped with a remote control system with a PS2 handle and a bluetooth module so that it can rove out and return back as required.
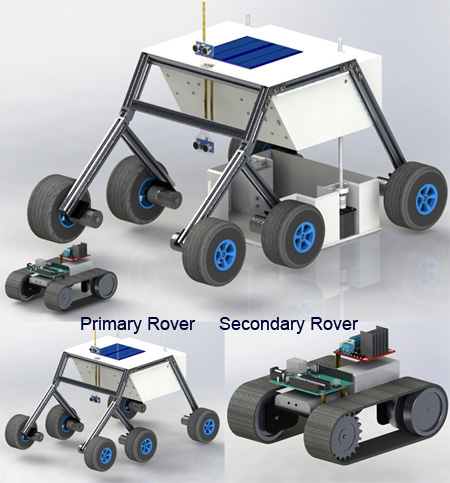
Fig. 1 Seperable rovers
Significance of Solution
The rotatable frame of the primary rover adopts the shape of right triangle so that it can climb up 2/3 of its own height.
The climbing process of the primary rover is divided into three stages.
- Lifting stage: First two wheels rotate while the rear wheel stays stationary
- Pushing stage: Six wheels rotate together to push the structure onto the platform
- Pulling stage: First four wheels drag the rest of the structure onto the platform
For the control of the lifting platform, two distance sensors are placed on the top and at bottom of the primary rover. If the reading of the top one reaches 400mm, the rover will stop. Once the difference of the two readings exceeds 400mm, the platform will come down, releasing the secondary rover.
Likewise, once reading of the pressure sensor on the top has a reading less than 985, the platform will be lifted as the wind is too strong for the structure.
![Fig. 2 Three stages of climbing [1]](https://www.ji.sjtu.edu.cn/wp-content/uploads/2020/08/vg100-3-pic02.jpg)
Fig. 2 Three stages of climbing [1]
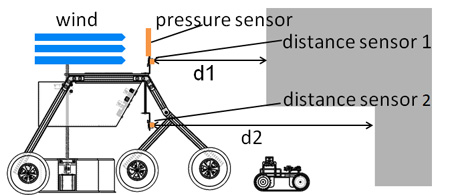
Fig. 3 Working of the sensors
Validation
Validation Process:
For the all-terrain roving structure, the primary rover climb a stair-like obstacle.
For the releasing function, we test the functioning of the lifting platform cooperating with the sensing part.
For the secondary rover, we show how it can operate using blue-tooth control.
Results:
According to validation part, most specifications can be met.
√ The primary rover can climb obstacle with a maximum height of 200 mm.
√ The lifting and dropping of the platform is stable when meeting different circumstances.
√ The secondary rover can move freely on flat surface with PS2 gamepad.
√ All the sensors respond properly according to the environment.
Conclusion
The Hercules consists of a primary rover with an all-terrain roving structure, a lifting platform, various senors and a secondary rover with a remote control system. The structure of the two rovers is made of aluminium and 3D printed parts. Therefore, the design requires precise dimensional and physical calculations to ensure the realization of expected functions. Furthermore, the rover includes various systems interacting with each other. So careful adjustment and testing is required to enhance its reliability.
Acknowledgement
Professor Yanfeng Shen, UM-SJTU Joint Institute
Professor Ting Sun, UM-SJTU Joint Institute
Dongxiao Yang, Hao Liu, Yang Shen and Yifan Shen, VG100 Teaching Assistants at UM-SJTU Joint Institute