近日,密西根学院本科生李柯志在智能车领域的顶级期刊IEEE Transactions on Intelligent Vehicles(简称T-IV,影响因子为8.2)上发表题为《Forehead or Headlights-At Which Height Should LiDARs Be Mounted on the Vehicle?》(车顶还是车灯,激光雷达应该安装在车辆的哪个高度?)的研究论文。文章重点研究了当前量产车激光雷达的安装位置对感知算法的影响。密院本科生李柯志为论文一作,教师杨明和钱烨强为共同通讯作者。

在国家政策和科技进步的推动下,越来越多的智能汽车在市场上推出。大多数的智能汽车为了获得冗余的感知信息以实现更安全的智能驾驶,选择在车身装载激光雷达。通过对市面上多款量产车的激光雷达的调研,可以发现其在车身上的安装高度是有明显差异的。
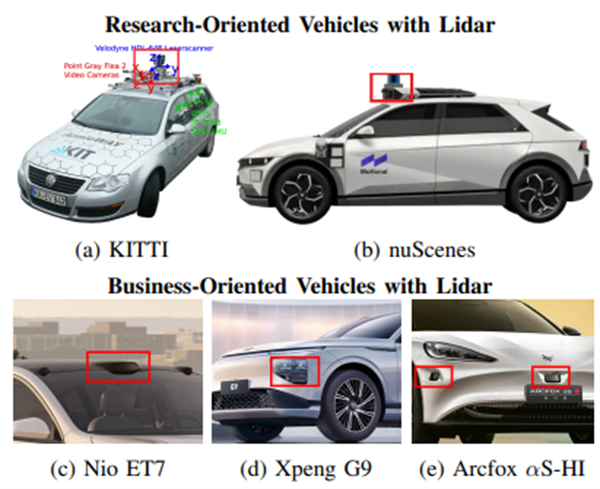
激光雷达安装高度的显著差异
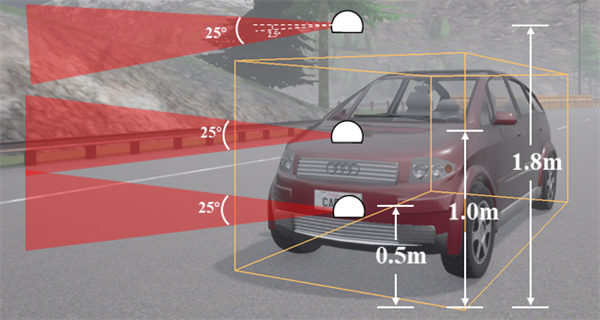
Carla仿真环境
传统的点云数据集,如KITTI, nuScenes既没有同时用多个不同高度激光雷达采集的数据,也没有场景中所有车辆的真值数据。基于此,该工作采用了carla仿真环境在高速场景上采集车辆点云数据,使用了安装在距离地面三个高度的激光雷达同时采集。除了点云和3D检测框,该工作还增加了范围和重要程度这两个指标。通过该数据集,该工作对不同高度激光雷达在量产车上的感知能力进行了综合全面的分析。该数据集已经开源:http://www.kaggle.com/datasets/kezhili/height3。
作者介绍

本文一作李柯志现为密西根学院电子与计算机工程专业大四年级学生,在杨明教授的智能车实验室参与科研期间,曾以第一名成绩成功立项䇹政第十一期项目,获得国家奖学金等奖项。

本文共同通讯作者杨明是上海交通大学特聘教授,联合学院党委书记,校智能网联电动汽车创新中心主任,国家“万人计划”科技创新领军人才。研究方向为低速无人驾驶系统。

本文共同通讯作者钱烨强是电信学院自动化系长聘教轨副教授,曾获得上海市超级博士后,SAA最佳博士学位论文等。研究方向为智能驾驶环境感知技术。




